As the permafrost warms in the Arctic, the landscape is undergoing rapid change, evidenced by vegetation shifts and the release of carbon dioxide and methane into the atmosphere, gases previously stored in the ground. To understand these changes better, in 2017 and 2018, a team from Los Alamos National Laboratory, New Mexico, USA mapped in detail an area of the Arctic at the Seward Peninsula in Alaska, using their Routescene RS4 UAV LiDAR system.

The extent of the survey areas: Green – 2017 boundary and Yellow – 2018 boundary. Map source Google Earth
This ongoing project is part of the Department of Energy’s Next Generation Ecosystem Experiments (NGEE) and has multiple laboratories and universities across the USA contributing. The aim of the NGEE Arctic project is to improve global climate model predictions by gaining a deeper knowledge of the Arctic terrestrial system.
UAV LiDAR mapping selected
The team identified that detailed, high resolution surface data was required to inform their research. The data also needed to be captured repeatedly over time to understand the evolution of the Arctic tundra system.
Photogrammetry was considered, however the team decided UAS LiDAR (Unmanned Aerial System) was the more suitable technology to use. Unlike photogrammetry, LiDAR is not dependent on good ambient light conditions, which is poor and unreliable at the Arctic site. In addition, the site was covered in undulating tussock tundra and shrubland. LiDAR can penetrate effectively through dense vegetation providing high resolution data of the surface beneath whereas photogrammetry only captures the vegetation canopy.
The team undertook considerable training to be fully prepared for their expedition and any eventualities. Routescene provided a dummy LidarPod as part of the turnkey package, so the flying team could practice flying their drone with the dummy payload in different weather conditions, to reduce the risk of damage when in the field. The Los Alamos team were appreciative of this as the weather did indeed prove challenging once in the Arctic.

The Routescene RS4 UAV LiDAR System mounted on their drone
Difficult terrain
The area mapped during the 2017 and 2018 expeditions was a remote 2.2 km2 watershed on the Seward Peninsula, Alaska, USA, about one hour drive outside Nome. The site had a 210m elevation gradient and the terrain was extremely challenging for the team. Features included large hill slopes, undulating topography, areas of standing water, tussock tundra over 50cm tall, large shrubs, and alder and willow over 2m tall. All the equipment had to be hauled manually in backpacks and on sleds over this unforgiving ground. The pace of travel was physically demanding and slow, each footstep was made very carefully.

The Arctic tundra to be surveyed during the UAS LiDAR missions
Challenging weather
During the 12 day campaign in August 2017 the temperature varied between 3 and 7ºC and rain was common which delayed flight operations. The team recognized they could not tolerate any damage to the drone or the UAV LiDAR System because the site was so remote it would take days to receive replacement parts to enable repairs. To shelter the equipment from the poor weather, the team soon realized a 6-person tent was better than the tarpaulin they had originally planned. This enabled them to continue working inside the tent whilst waiting for the conditions to improve. To combat the undulating terrain and high winds experienced, the team constructed a portable 2.4 x 2.4m drone landing pad to ensure safe take-offs and landings.
In contrast, weather conditions were more favorable during the 2018 2 day expedition with temperatures nearer 15ºC and no rain. The team experienced nearly 24 hours of daylight per day allowing them to work longer to gather as much data as possible during these good weather conditions.
Learnings for Best Practice
It was noted at the start of the project in 2017 that it was difficult to find best practice material to inform the team’s planning. The team collated their learnings during the first expedition to create an operational best practice framework to aid future work. The best practice covered three fundamental concepts: resilience, efficiency and safety, the aim being to address each in a systematic way.
1. Increase resilience
The team recognized they needed to build adaptability into both the system and the team to anticipate and overcome the many challenges presented through working on a remote site in extreme conditions. They identified they needed to build resilience concerning the weather, the equipment, the terrain and the vegetation density.
Rain, wind, low and high temperatures impacted the project. Despite the tent being more difficult to transport over the rough terrain, it provided better shelter than the tarpaulin and room to work in relative comfort when weather conditions were poor. Hand warmers and foot warmers were used to keep both the personnel warm and to heat the equipment and batteries; electric heaters and insulated containers were also used.

Taking cover from the rain
The team and equipment taking shelter in a tent during poor weather conditions
Avoiding a single point of failure of the equipment which would jeopardize the project was critical. One of the major causes of delay during the 2017 expedition was UAV reliability. In 2018 the team used a different UAV which extended flight times, enabled heavier payloads and reduced the turnaround time between each flight. The overall impact was improved productivity: in 2017 the team averaged 3 flights per day, which doubled in 2018.

A different model of drone was used in 2018 which enabled increased payload and flight times
Additional measures to avoid single points of failure included making a drone landing pad so the UAV could land safely in the event of a motor failure; and where budget allowed spares were purchased of critical components. The budget did not extend to a spare Routescene UAV LiDAR System, so the dummy LidarPod was used on all test flights.
2. Improve efficiency
The team soon learned that small inefficiencies and errors quickly added up to cause unexpected delays. They looked for ways to increase operational efficiency and maximize the return on their effort.
In particular, after the 2017 project, the team analyzed how they could improve the quality of the data being collected, knowing that the 2018 expedition site featured dense vegetation. In 2017 the Routescene UAV LiDAR System was set to single return mode and the entire watershed was flown at 6m per second, from 35m above the ground, producing a point cloud density of 300-500 points per square meter. In 2018 the team decided to fly the smaller site at a lower altitude, more slowly and to set the Routescene UAV LiDAR System to dual return. Flying at a speed of 2m per second and at an altitude of 20m, the team was able to penetrate the denser vegetation and achieve impressive point densities of 5,000 points per square meter. Flying the Routescene payload at oblique angles to the ground also improved vegetation penetration.
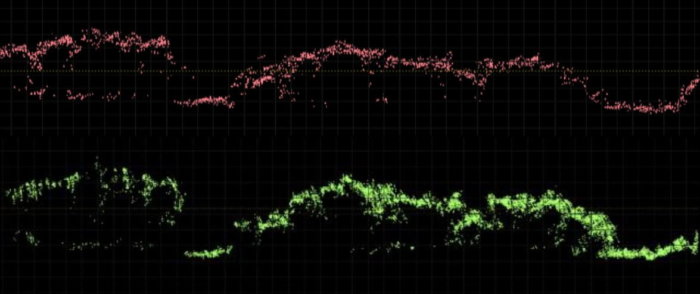
LiDAR data of similar vegetated areas in profile to compare single return results (top) versus dual return results (bottom)
Further adjustments to improve data quality included a review of the satellite configuration present at the time of flight to achieve the most accurate RTK corrections possible for the UAV LiDAR System.
Batteries were a challenging component during both expeditions. Most of the electronic equipment required batteries to operate including the UAV which needed 3-4 sets. Low temperatures reduced battery performance and the team carried extra sets of batteries when possible to reduce delays. Using a generator on-site to charge batteries also reduced delays and removed the need to charge batteries during the evenings in the hotel.
Communication between team members was important; combined with implementing operational discipline using equipment checklists, procedural documents, flight logs, pre-flight checklists especially for flight-critical UAV components, and battery logs.
3. Increase safety
Safety of the team was paramount. The team realized that integrating safety across all their operational activities would facilitate safety in all other aspects of the project too.
Travel across and working on difficult terrain carried the risks of injury or damage to the equipment. To reduce the distance the team needed to travel on foot, they drove as close as they could to the outskirts of the site. Once on foot, they discovered that sleds and backpacks were the best way to move equipment across the terrain. As a result of this careful planning, the team did not sustain any injuries during the surveys.

Example of the difficult terrain encountered
High winds made UAV take-offs and landings problematic. Devising a landing pad, which was approximately 4 times the size normally required to land a UAV to accommodate the varying wind conditions and level the undulating site, enabled the team to take-off and land safely.
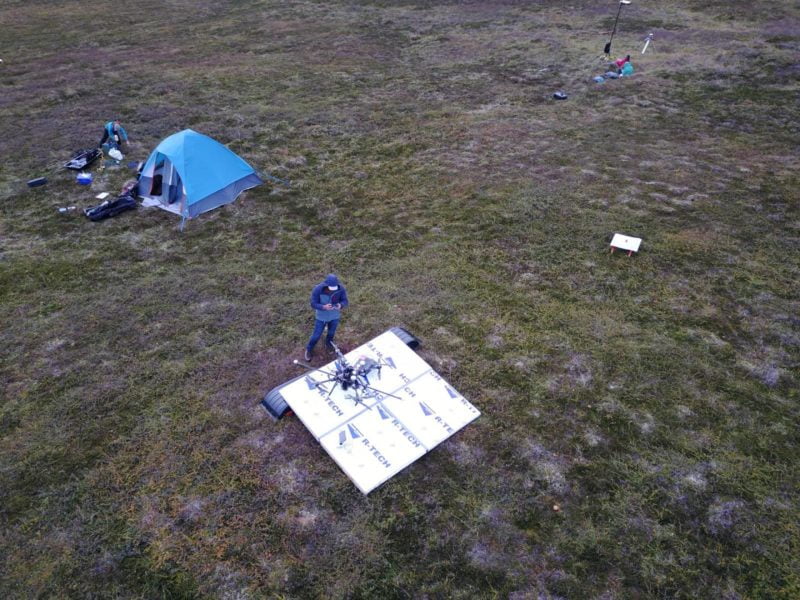
Landing pad with equipment set up ready for launch
Clear communication during take-offs and landings, assigning clear roles and using agreed spoken commands further improved safety. The team used wireless headsets for easy hands-free communication when in close proximity to one another and two-way handheld radios over longer distances (up to 2 km).
Summary
The data collected is now being used to understand the interaction of different vegetation types to control the distribution of soil moisture, snow depth, permafrost temperature and biogeochemistry in Arctic landscapes.
This project was challenging due to the many complexities of collecting UAS LiDAR data in such a remote location in extreme environmental conditions. We formed a successful fielding team that achieved operational excellence, and worked with Routescene to understand how best to collect the data. We examined our field expeditions in detail, and learned how to modify our workflow to get the best possible result and gain improved resilience, efficiency and safety that we now bring to all of our UAV projects. The Routescene team assisted us with data processing, working as partners to produce quality data products.”
Adam Collins, Los Alamos National Laboratory
A major challenge in the development of bare-earth and vegetation models from the LiDAR data collected was the extremely dense, multi-layered, short-statured vegetation comprised of moss, grass, forbs, prostrate shrubs and upright shrubs that obscure finer patterns of ground surface topography. Routescene technologists and Los Alamos scientists jointly developed and applied vegetation filtering methods tailored to this unique tundra environment to create ground surface and vegetation models.
This proved to be a valuable project to work on with the Los Alamos team. It demonstrated that the Routescene UAV LiDAR System can be used effectively and efficiently in cold, wet, difficult conditions. It provided new insights into future product development, particularly for hostile environments; and through working with the data collected we have developed filters in our post-processing software to reduce noise such as rain. This enables data collection to continue in poor weather, driving further efficiencies for future Arctic surveys.”
Gert Riemersma, CTO and founder of Routescene
For further information visit: